Algorithm: HOS 2.0
This month, we completed the development of our new end-to-end algorithm, HOS 2.0, which utilizes camera inputs for object detection, drivable range estimation, and decision-making processes. This achievement marks a significant step forward in integrating advanced vision-based perception into our autonomous driving system.
As a next step, we will incorporate a Vision-Language Model (VLM) to enable the system to generate textual descriptions of road situations, providing enhanced interpretability and situational awareness.

Citroën AMI Conversion
Drive-by-Wire System
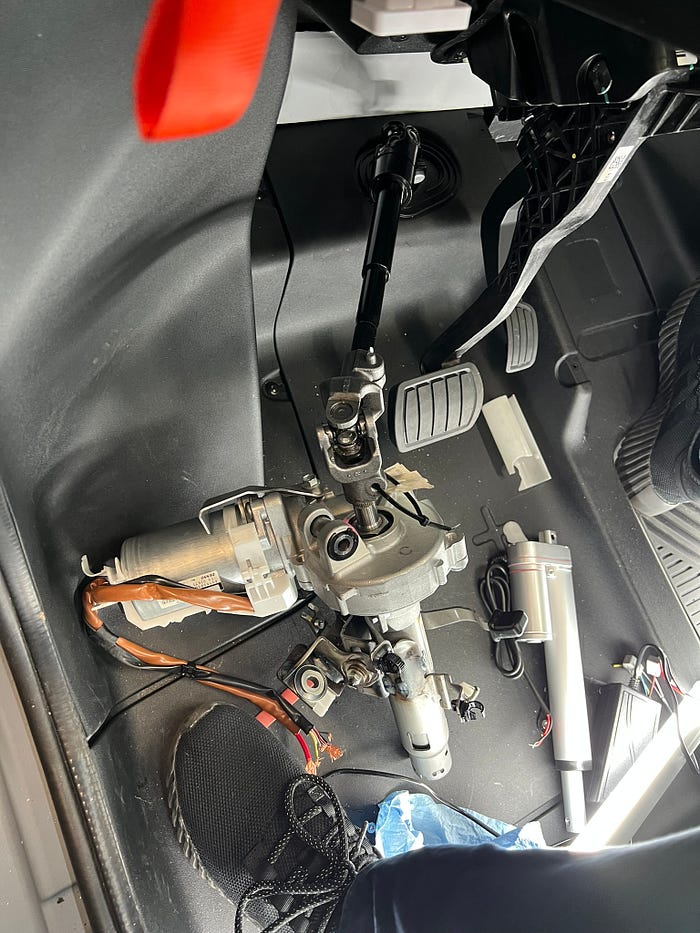
We have successfully addressed challenges in implementing the drive-by-wire system by:
- Steering: Installing a Toyota power steering module. This allows us to control the motor directly, enabling precise front-wheel movement.
- Acceleration: Integrating a custom PCB connector to intercept and manipulate signals from the acceleration pedal.
- Braking: Planning to install a 150mm/s actuator on the brake pedal, ensuring robust and responsive braking control.


Camera Integration
We evaluated two types of cameras:

- Tier IV Camera (Japan)
- Sensing Camera (Shenzhen)

Additionally, we have tested OV5940 camera modules for performance comparisons. Moving forward, we will install the Sensing Camera and OV5940 modules on the Citroën AMI for further testing.
Roadmap
In December, we aim to complete the retrofit process. The priority is to ensure that all drive-by-wire systems are fully functional, keeping us on track to meet our timeline.

Our goal is to have the first retrofitted Citroën AMI operational on the road by January. We have identified a small, controlled area for initial testing, where the car will operate in a driver-supervised but hands-free mode.
This concise update provides clear progress details while maintaining a professional tone suitable for investors. Let me know if you’d like further refinements or additions!
hello@osmosisai.co